1. Intro
전동기의 구동 목적은 토크를 생성하여 자동차를 움직이거는 등 원하고자 하는 동작을 하는 것이다.
따라서 출력 토크제어가 매우 중요함.
이때 평균 토크와 순시토크를 제어하는 두 가지 방법이 있음.
선풍기, 팬과 같은 정밀한 속도와 토크가 필요하지 않은 곳은 평균 토크 제어
->정상상태 특징만 제어하는 스칼라 제어
하지만 자동차, 로봇과 같은 고정밀 제어가 필요한 곳은 순시 토크 제어
->정상상태+과도 상태를 제어 & 전류의 크기, 위상을 제어하는 벡터 제어

토크는 자속과 전류의 cross product로 표현된다. 이는 토크는 자속과 전류 각각의 크기와 위상차를 고려해야되는 것을 의미.
보통 순시 토크 제어에서는 자속을 기준으로 전류를 제어한다.
2. DQ 변환
순시 토크를 제어하는 기법은 보통 타여자 DC 전동기에서 쉽게 구현가능하다.
이때 유도 전동기를 타여자 DC 전동기와 동일한 방법으로 제어하기 위해서는 벡터제어 기법이 사용된다.
DQ 변환이 필요한 이유가 여기서 등장한다.,
물론 3개의 변수를 2개의 변수로 축소시켜 제어와 연산의 용이성도 있지만 AC 전류를 DC 전류처럼 표현하여 DC 전동기의 제어 기법을 그대로 사용하고자 하는 목적을 지니고 있다.
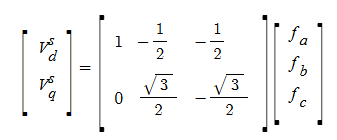
우선 abc 3상을 dq축으로 정사영내리는 행렬을 이용하면 dq 정지 좌표계로 변환이 가능하다.
이후 회전하는 자속에 맞추기 위해 정지좌표계를 회전 좌표계로 변환해야한다.
이를 위해 회전 좌표계와 정지 좌표계 사이의 자속 각(Theta_e)를 알아야한다.
그리고 이 자속 각을 이용하여 아래와 같은 행렬을 사용해 회전 좌표계 d,q값을 알 수 있다.

이때 이 벡터 값을 얻는 방법을 기준으로 간접 벡터 제어인지 직접 벡터 제어 인지 구분할 수 있다.
3. 회전자 자속 기준 직접 벡터 제어
해당 기법은 3상의 회전자 전류에 의해 발생한 회전자 쇄교 자속을 이용한다. 이때 쇄교자속 벡터를 회전좌표계의 d축에 일치시키는 것이다.
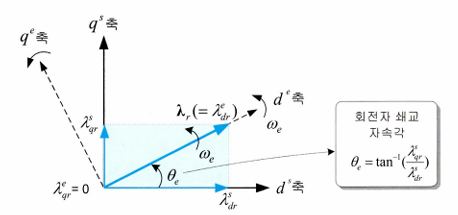
출처 : 모터제어 (4판)
그렇다면 위와 같이 q축의 회전자 쇄교자속 성분은 0이 된다.
그리고 위 그림처럼 회전자 쇄교자속을 정지 좌표계에 표현한다면 d축과 q축으로 나눌 수 있고 이를 이용하여 우리의 목표인 회전각을 구할 수 있다
이렇듯 회전자 쇄교 자속에 대한 정보를 직접적으로 이용하여 회전 각을 계산하는 것이 직접 벡터 제어 기법이다.
이 회전 각을 기준으로 변환된 회전(동기) 좌표계에서 고정자 전류의 d축과 q축이 각각 갖는 의미를 파악해보려 한다.

다음 식은 회전자 d축의 전압 방정식이다. 회전자 q축의 쇄교자속 성분이 0인것을 적용하여 식을 정리하면 다음과 같다.
이때 p는 미분 연산자를 의미한다.
다음으로 회전자 d축 의 쇄교자속 성분은 아래와 같이 자기 인덕턴스와 상호 인덕턴스(고정자와의)로 표현할 수 있다.

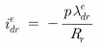
위 식에 회전자 d축 전류 성분을 대입하여 정리한다면 다음과 같다.
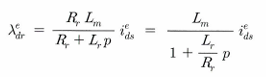
사진 설명을 입력하세요.
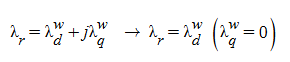
이때 아래 수식과 같이 회전자 쇄교 자속은 d축만 존재하도록 설정하였다.
즉, 고정자 전류의 d축 성분에 의해 회전자 쇄교 자속이 직접적으로 조절되는 것을 알 수 있다.
따라서 고정자 전류의 d축 성분은 "자속 성분 전류"라 지칭한다.

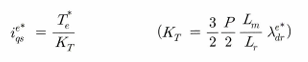
다음으로 유도 전동기의 토크 방정식에서 회전자 쇄교 자속의 q축 성분이 0인 것을 적용하면 다음과 같다.

회전자 쇄교 자속의 d축 성분을 일정한 상수로 취급한다면

토크는 고정자 전류의 q축 성분에 직접적으로 제어 되는 것을 알 수 있다. 따라서 이를 "토크 성분 전류"라고 부르게 된다.
정리하자면 회전 좌표계에서 고정자 전류의 d축은 자속 성분 q축은 토크 성분과 관련있는 것이며 이는 d-q변환에서 d축을 자속이 발생하는 축 q축을 토크가 발생하는 축으로 가정한 것과 일치하는 것 같다.
이를 이용한 벡터 제어 시스템의 그림은 아래와 같다.
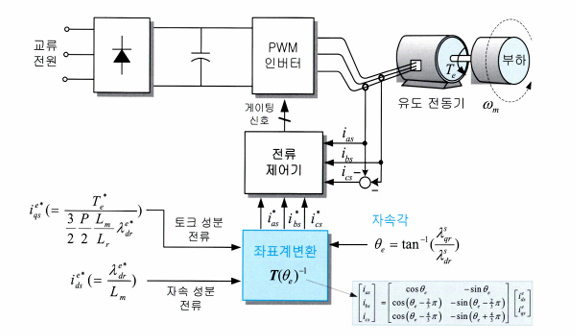
토크는 자속과 전류의 성분으로 구성되어 있으므로 토크 발생을 위해서 자속을 먼저 발생시켜야 한다.
회전자 쇄교 자속의 크기는 전동기의 정격 전압과 정격 주파수 등에 의해 결정된 정격의 값으로 일정하게 주어진다. 이를 이용하여 d축의 고정자 전류를 결정할 수 있다.

d축의 고정자 전류(자속성분전류)를 흘러주어 쇄교 자속을 흘러보내준 후 원하는 토크 지령을 얻기 위한 q축의 고정자 전류를 결정할 수 있다.
이 d, q축으로 주어진 전류를 회전각을 이용하여 역변환 한다면 a,b,c 3상의 전류 지령으로 계산되고 이를 전류제어기에 인가하여 전압 지령을 얻어내고 최종적으로 인버터에 인가하여 원하고자 전압을 생성하여 유도전동기에 인가하는 프로세스로 이어진다.
4. 회전자 자속 기준 간접 벡터 제어
위의 직접 벡터와 다르게 해당 기법은 직접적으로 자속의 정보가 필요하지 않아 간단하다.
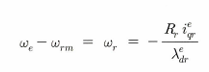
q축의 회전자 전압 방정식에서 q축의 회전자 자속 벡터가 0인 것을 적용하면 아래와 같다.

이때 농형 회전자는 끝에가 short난 상태이므로 전압이 0인 것을 적용하였다.
위 식을 정리하여 슬립 각속도(동기속도 - 회전자 자체의 회전속도)를 구할 수 있다.
이때 회전자 전류를 제거하기 위해 회전자 쇄교 자속 q축의 식을 이용한다.
(회전자 전류를 제거하려는 이유는 위의 벡터제어 시스템 그림처럼 고정자 전류만으로 컨트롤 하기 위해서..?)
이때 d축의 회전자 쇄교 자속 식을 이용해 슬립 각속도를 고정자 전류 성분 만으로만 표현할 수 있다.
위 식의 의미를 해석해보면 아래와 같다.
고정자 전류는 d축 성분과 q축 성분 제곱에 루트를 씌운거인데, 슬립 각속도가 정해지면 이를 맞추기 위해 d축과 q축 성분이 적절하게 배분된다.
정리하자면
1. 직접벡터와 같이 지령 자속과 지령 토크를 통해서 지령 d,q축 고정자 전류를 얻을 수 있다.
2. 그 지령 전류를 맞추기 위해 슬립 각속도를 조절해주면 되는 것이다.
3. 슬립 각속도를 조절하기 위해서는 슬립각속도 = 동기속도(=2*pi*fe[전기 주파수])- 회전자 자체 속도인(wrm)인데 이때 동기 속도를 조절해주면 된다.

또한 회전각은 위 식으로 구할 수 있다.
여기서는 회전자 자체속도(wrm)이 필수적인데 이는 엔코더에서 측정가능하다.
그리고 Tr의 시정수는 Lr/Rr인데 저항값은 운전 중 쉽게 변동가능하고 자기 인덕턴스 역시 변동 가능성이 있어 슬립 각속도가 부정확할 수 있다.
이때 궁금한 점.
직접 벡터 제어 프로세스를 보면
- 지령치의 토크값과 회전자 자속 성분이 주어짐(회전 좌표계상)
- 이를 토대로 고정자 전류 d,q축 성분 구함(회전 좌표계상)
- 이 고정자 전류 d,q축 성분을 회전각을 이용하여 정지좌표계상으로 변환.
여기서 회전각을 이용하려면 정지좌표계 상 회전자 자속을 알아야함.
하지만 우리가 지금 알고 있는건 회전 좌표계상 회전자 자속임.
그러면 초기에는 회전각 어떻게 구하는지.