1. 케이블 결선
연구실에 쓰이지 않고 있던 유도 전동기를 구동하고 한다.
우선 전체적인 모습은 다음과 같다.

좌측의 검은색은 동기 전동기 (SPMSM) 이고 오른쪽의 동그란 것이 유도 전동기이다.
우선 하드웨어적으로 모든 준비를 완료해야 한다,
유도기를 보면, 유도기는 3상 전압을 인가할 수 있는 파워 커넥터 작업이 이미 완료 되어 있다.
하지만 동기기는 다음과 같이 엔코더와 파워 커넥터를 꽂는 소켓은 존재하나,
이와 결선가능한 케이블과 커넥터가 없는 상황이다.
이를 구매하기 위해, 모터 명판의 품명을 통해서, 모터의 데이터 시트를 어렵지 않게 구할 수 있었다.
데이터 시트를 찾다보니, 모터와 결합할 수 있는 파워 커넥터와 엔코더 커넥터를 찾았다.
이때 l자 형으로 구입한 이유는 결선의 편리함을 위해서 였다.
추가로 각각의 Cable Clamp도 같이 구입하였다. 부품 역시 Digikey와 Mouser를 통해 구입하였고, 배송도 일주일 이내에 받아볼 수 있었다.
해당 제품이 모터에 직접적으로 꽂는 커넥터이다. 참고로 위 사진은 핀수를 보면, 엔코더 용임을 알 수 있다.

위 사진은 Cable Clamp이다. 커넥터부의 끝에 결합되어 선이 좀 더 깔끔하게 정리되고 고무로 절연처리 되어있다.
다시 모터의 데이터 시트를 통해 최대 전류와 정격 전류를 확인하였다.
이후 저 커넥터에 결합하여 납땜할 수 있는 전선을 선정하였다. 이때 모터의 전류를 모두 허용할 수 있는 용량의 케이블을 사용해야한다.

파워커넥터는 다음과 같이 완성되었다.
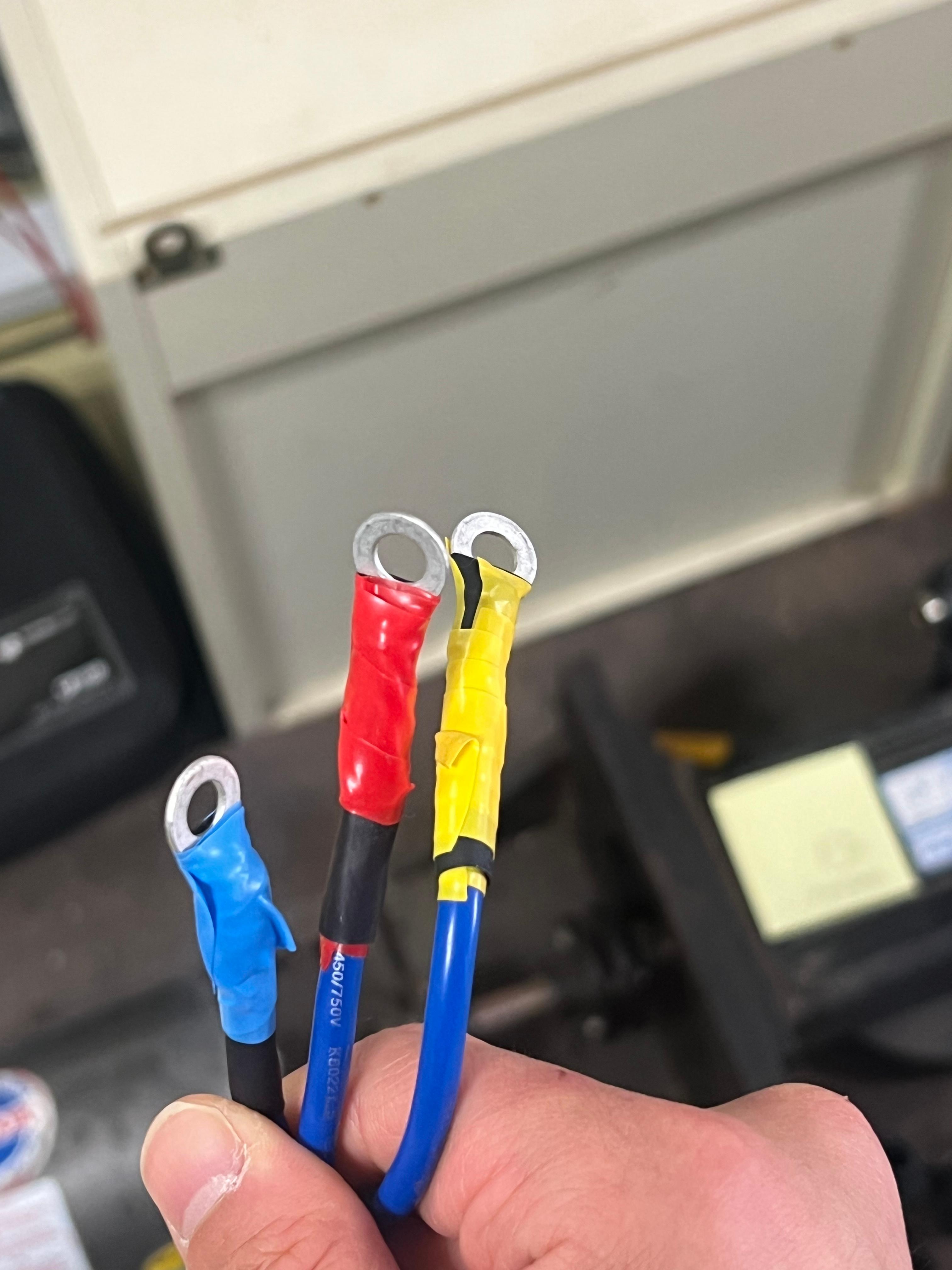
한쪽 끝은 러그를 연결하고 절연처리하여, 인버터에 결선할 수 있도록 작업하였다.

전체적인 모습은 다음과 같다. 오른쪽 구석에 잠깐 보이는 상자가 MG 세트에 3상을 인가해줄 인버터이다.
2. 엔코더 옵셋 신호 선정
다음으로는 엔코더를 살려야 한다.
우선 실험에서 사용할 제어보드와 모터의 엔코더 핀맵을 비교해야 한다. 엔코더 신호가 제어보드로 가고 이를 통해
오실로 스코프로 실제 파형을 볼 수 있기 때문이다. (만약 엔코더가 SHORT나거나, 잘못결선하면 제어보드 터짐)
멀티미터와 제어보드의 회로도를 이용하였다. 제어보드의 회로도를 보며, 제어보드쪽의 엔코더 핀이 각각 무엇을 의미하는지 찾고 모터 데이터 시트 속 엔코더 핀맵과 비교하였다.
다행히도 기존 사용하던, 제어보드와 핀맵이 일치한다.
영구자석의 극(pole) 수를 알기 위해서는 모터가 기계적으로 360도 회전할 때, 전기적인 신호가 몇 번 찍히는지 봐야한다.
오실로스코프의 전압 probe를 동기기의 a상과 n상에 찍었다.
그다음, 손으로 정확히 360도 일정하게 회전 시켰다.
이때, 역기전력 신호가 오실로 상에 찍히는데, 정확히 4번 반복되는 것으로 보아 8극기 인것을 알 수 있었다.
이후 모터를 구동하는 연구실 코드속 InitEncoder 코드에서 데이터 시트 상의 PPR을 넣어주고 Pole 도 바꾸어줬다.
그 다음 오실로 스코프를 이용해서 실제 d축과 z pulse가 나타나는 간격을 찾았다. 이를 정확하게 찾으면, 엔코더 옵셋값으로 이용하여 정확한 엔코더 측정이 가능하기 때문이다.