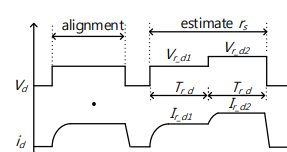
이제 유도기가 포함된 MG 세트를 구동하기 앞서, 각 Parameter들을 찾아야 한다. 해당 과정에서는 설승기 교수님의 '전기기기제어론'과 여러 논문을 참고하였다. 우선 동기기부터 진행하려 한다. 1. 고정자 저항 (Rs) 찾기 ( 고정자 저항값은 정밀 저항계를 이용해 측정하면 된다. -> 세부적인 내용은 추후 서술 예정) 부경대 정영석 교수님의 ' 위치센서가 없는 영구자석형 동기전동기의 파라미터 측정' 논문 중정지 상태의 모터(q축 전원인가 x)에 서로 다른 2개의 d축 전압을 인가하는 방식이 등장한다. 그럴 경우 각각 다른 d축 전류가 흐르고 있을 것이다. 이때 옴의 법칙을 이용하여 해당 수식을 이용하면, 고정자 저항이 나온다고 한다. 여기서 어느정도의 전압을 인가해야하는지는 좀 더 공부해야..